PWM制御における『三相変調』と『二相変調』について
はじめに
EVに搭載されている三相インバーターは、バッテリーから供給される直流を交流に変換するという役割を担っている。その際に、単に直流を交流に変換するのではなく、出力をも自在にコントロールすることができる。
この時インバーターでは PWM (Pulse Width Modulation)(パルス幅変調)と呼ばれる制御が行われており、その中でも三相全てを変調する三相変調と、二相のみを変調する二相変調という二つの変調方式が存在する。そこで今回は、三相インバーターのPWM制御時における、これら二つの変調方式の違いについて解説していく。
PWM (Pulse Width Modulation)(パルス幅変調)
PWM(パルス幅変調)とは、直流電圧の入力からパルス列のONとOFFの一定周期を作り、ONの時間幅(パルス幅)を変化させる制御方法である。インバーターの出力電圧は、この時のONのパルス幅に比例する。これを周期的に変化させることにより、モーター駆動に最適な正弦波の交流電圧を作り出している。
三相変調
以下に三相インバーターの回路図を示す。
U, V, W 各相の出力電圧:VU, VV, VW
U, V, W 各相間電圧:VU-V, VV-W, VW-U

三相インバーターから出力される三相交流波形は、以下の二つの波形を基に作り出される。
・モーターの回転数に同期した周波数の信号波 “基準正弦波”
・スイッチング周波数を決定するキャリア周波数にて設定される “三角波変調波”
両波形のレベルを比較し、信号波値>三角波値 のとき、上アーム側のスイッチは “ON” になり、 VU, VV, VW が “High” になる。(このとき、上アームと下アームのスイッチは相補的にスイッチングしているので、下アーム側のスイッチは “OFF” になる)

ここで、モーターに供給される電圧は各相への入力電圧 VU, VV, VW の差となる(=相間電圧 VU-V, VV-W, VW-U )。このとき、各相間電圧VU-V, VV-W, VW-U は、信号生成時の基準正弦波と同じ周波数の波形となってモーターに供給される。

このように、三相が常に変調し各相の出力波形が正弦波状になる変調方式を、三相変調と言う。三相変調は制御の自由度が優れており、PWM制御の基本の方式となる。
二相変調
二相変調とは、基準正弦波の一周期のうち特定の一相だけをONもしくはOFFに固定し、他の二相を変調する方式のことである。二相変調の中にも、上下方式と呼ばれるもの、下方式と呼ばれるものが存在する。順を追って説明していく。
■上下方式
三相変調では、U相を基準とした時、V相は120°、W 相は240° 位相が遅れた正弦波信号を用いる。二相変調の上下方式では、各相 60°の期間は出力 “High” (上アーム常にON)になるタイミングと、 60°の期間は出力 “Low” (下アーム常にON) になるタイミングが発生する。以下に、このときの VU, VV, VW の電圧信号を示す。

上の図の通り、一周期の中で三相のうちどれか一相は “High” もしくは “Low” に固定されており、常時二相が変調される状態になる。
■下方式
二相変調の下方式では、三相のうち VU, VV, VW のパルス間隔の最も大きい相が停止相に選ばれ、その期間(120°) の間は出力 “Low” (下アーム常にON)に固定され 、他の二相を変調する状態になる。以下に、このときの VU, VV, VW の電圧信号を示す。
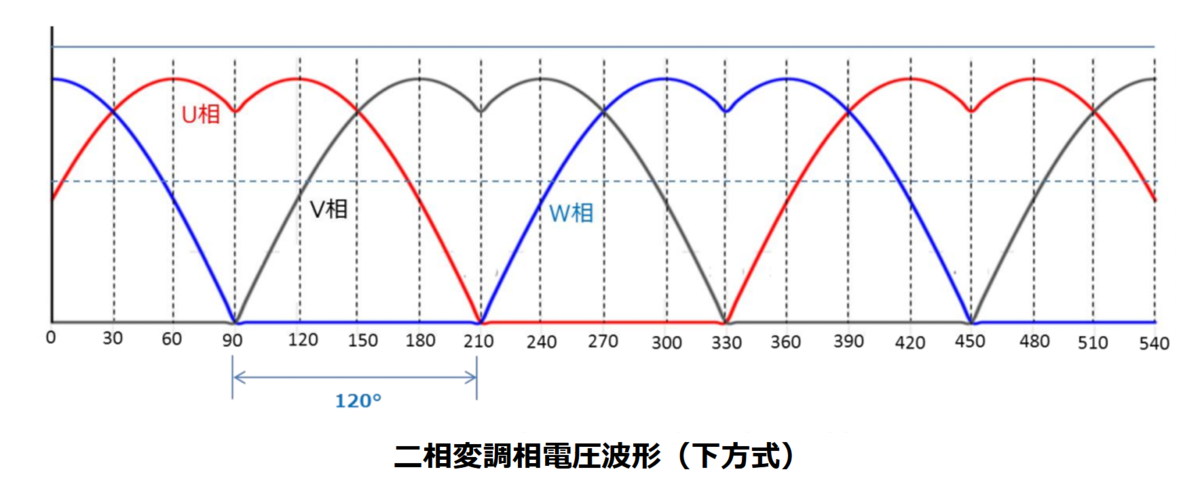
これらの二相変調方式では、パワー半導体のスイッチング回数が2/3に減少するため、スイッチング損失が低減される。また、最大線間電圧(電圧利用率)も向上するため、モーターの高回転時には二相変調方式が用いられる場合がある。さらに、下方式は、モーターの中性点電圧が三相変調方式と比較した場合最大で2/3となり、モータの信頼度向上に貢献する。
まとめ
インバーターは PWM (Pulse Width Modulation)(パルス幅変調)と呼ばれる制御で交流の出力をコントロールしている。その際 U, V, W 三相全てを変調する三相変調と、どれか二相のみを変調する二相変調という二つの変調方式が存在する。
■ 三相変調:三相が常に変調される状態。制御の自由度が優れている。
■ 二相変調:三相のうちどれか一相は High もしくは Low に固定されており常時二相が変調される状態。スイッチング回数が2/3になるのでスイッチング損失が低減される。最大線間電圧が上がる。(モーターの高回転時に有利)
参考文献:
インバーターでの電力変換の原理と発生する損失
はじめに
“損失の低減” はEVの性能向上を図る上で欠かせないキーワードである。以前、モーターで発生する損失要因については こちらの記事 で解説したが、モーター駆動の際にはインバーターの存在を忘れてはいけない。※その理由に関しては こちらの記事 で解説している。
インバーターはバッテリーから供給される直流を交流に変換する働きを担っているが、この電力変換時にも当然損失は発生する。この時に発生する主な損失要因として「導通損失」「スイッチング損失」「ダイオード損失(デッドタイム損失)」が挙げられる。今回はインバーターの電力変換の原理を解説しつつ、これらの損失の正体について解説していく。
電力変換の原理
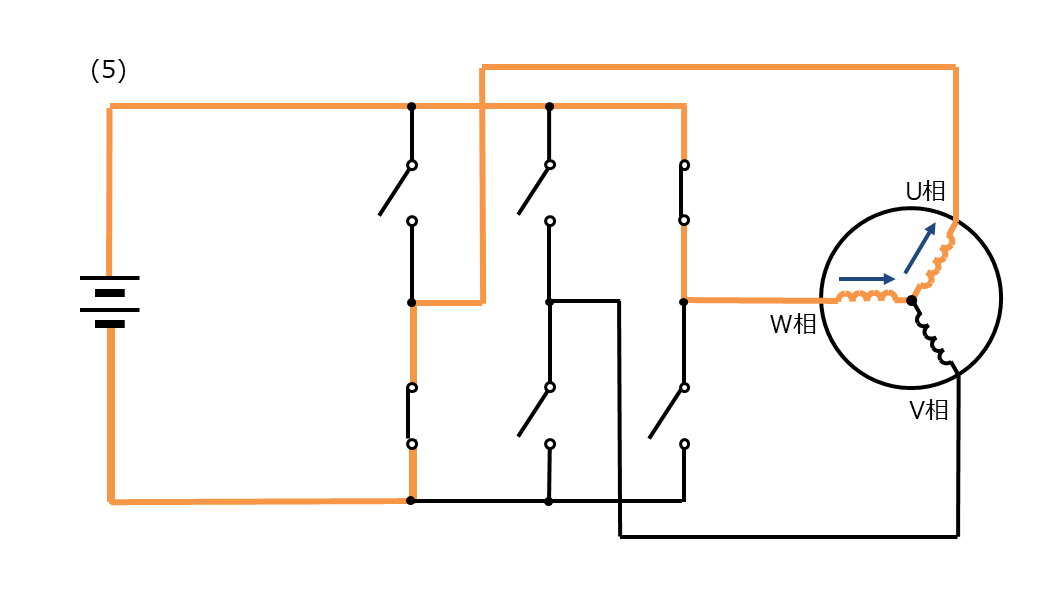
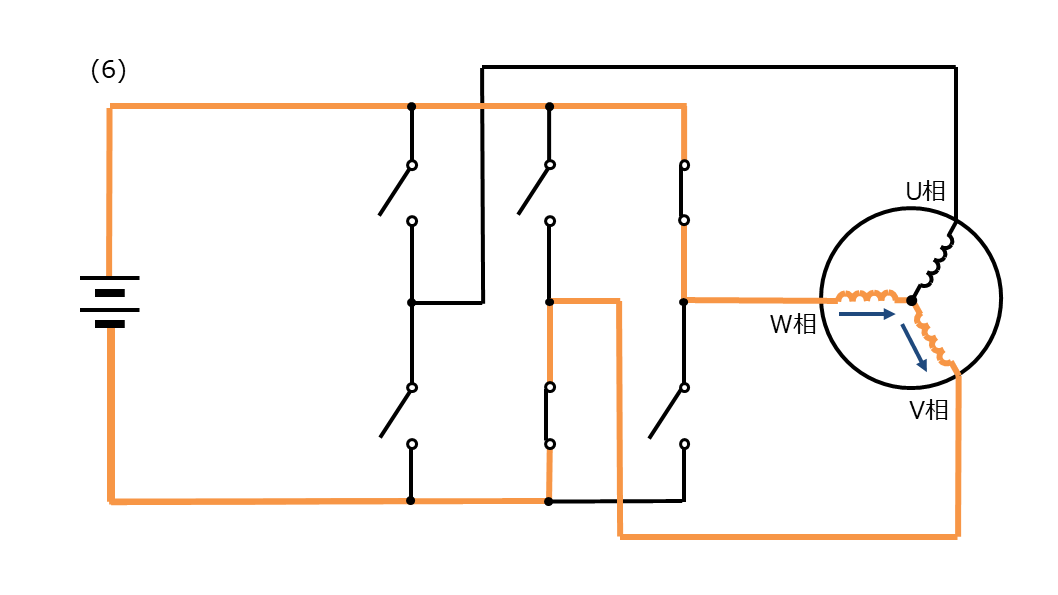
まずは、インバーターでの電力変換の原理について解説する。一般的にEVのモーターの駆動には電圧型の三相インバーターが用いられる。以下に回路図を示す。

電力変換の原理が分かりやすいように回路図を簡略化すると以下のようになる。

図の左側の状態ではバッテリーと負荷が順手でつながっており、右側の状態ではバッテリーと負荷が逆手でつながっている。インバーターはこれら2つの状態を周期的に行き来することで負荷にかかる電圧の向きを周期的に反転させ交流を作り出している。この時上アーム/下アームの半導体デバイスはそれぞれ対になっており、どちらかがONの時はもう片方は必ずOFFになっている(相補的スイッチング)。
実際に三相インバーターでは、これらの動作を各相120°ずつ位相をずらして1周期6ステップで運転を行う。これを120°通電方式という。この時の電流の様子を以下に示す。




ここからは、上記のような電力変換時にインバーターで発生する損失「導通損失」「スイッチング損失」「ダイオード損失(デッドタイム損失)」について解説していく。
導通損失
導通損失とは、半導体デバイスがON状態で電流が流れているときパワー半導体の内部抵抗で生じる損失。
スイッチング損失
スイッチング損失とは、パワー半導体がON/OFFするときに発生する損失。
理想的には、パワー半導体のON/OFFは0秒で切り替わり、スイッチング時に電流と電圧が重なることはない。しかし、実際にはパワー半導体のON/OFFには立ち上がり時間/立ち下がり時間を要し、この間はパワー半導体に電圧がかかる&電流が流れるという状態となる。

この立ち上がり/立ち下がり時間中の電流と電圧の重なりによってスイッチング損失が発生する。
ダイオード損失(デッドタイム損失)
ダイオード損失(デッドタイム損失)とは半導体デバイスのデッドタイム期間に、パワー半導体に逆並列で接続されている還流ダイオードに流れ込む電流によって生じる損失のことである。まずは「デッドタイム」「還流ダイオード」について順を追って解説していく。
■ 短絡防止期間(デッドタイム)
上下アームの半導体デバイスが相補的にスイッチングする際、両サイドのスイッチが同時にON、または同時にOFFすることなくスイッチが切り替わるのが理想的である。しかしながら、実動作においてそれは困難であり、わざとあえて両サイドのスイッチが同時にOFFする期間を設けている。この期間をデッドタイムと呼ぶ。一瞬でも両サイドのスイッチが同時にON状態になってしまうと、バッテリーが短絡状態となり、大電流が流れてパワー半導体を破壊することになるので、これを避けるためである。
インバーターの回路図中で、パワー半導体と逆並列で接続されているダイオードは還流ダイオードと呼ばれるものである。還流ダイオードーの役割を図示すると以下のようになる。


スイッチがOFFになった直後、電磁誘導の法則より、モーターコイルに流れる電流は今までと同じ方向に流れようとする。このとき還流ダイオードがあると、この逆流電流は還流ダイオードの方を通ってバッテリーの正端子へと帰還する。もし還流ダイオードが無いと、パワー半導体に負の高電圧が発生してパワー半導体が破壊される恐れがある。このように、還流ダイオードはモーターから逆流してくる電流の逃げ道として機能する役割を担っている。
このとき、還流ダイオードの内部抵抗によって損失が生じ、これがダイオード損失(デッドタイム損失)となる。
まとめ
インバーターはパタパタと周期的にスイッチを切り替えることで直流を交流に変換している。三相インバーターの場合はこれらの動作を各相120°ずつ位相をずらして1周期6ステップで運転を行う(120°通電方式)。電力変換の際には以下のような損失が発生する。
■ 導通損失
パワー半導体の内部抵抗で生じる損失
■ スイッチング損失
パワー半導体がON/OFFするときに発生する損失
参考文献:
深尾正 『電気機器・パワーエレクトロニクス通論』 オーム社
見城 尚志, 佐渡 友茂 『メカトロニクスのモーター技術』 技術評論社
Electrical Information 『MOSFETのスイッチング損失とは?『計算方法』や『式』について』
デンソーテクニカルレビューVol.22 『デッドタイム制御機能内蔵 SiC MOSFET 用ゲートドライバの開発』 株式会社デンソー
モーターで発生する損失『鉄損』と『銅損』
はじめに
EVの性能向上考えたとき、損失の低減が一つのキーワードとなってくる。実際にEVの駆動時にモーターで発生する主な損失として「銅損」と「鉄損」が挙げられる。今回はこの「銅損」と「鉄損」の正体について解説していく。
銅損
「銅損」とはモーターのコイルに電流が流れる際に、コイル巻き線の抵抗により生じる損失のことである。銅損の大きさは負荷の2乗に比例し、無負荷状態では銅損は発生しない。
鉄損
「鉄損」は電気エネルギーを磁気にエネルギーに変換する際に生じる損失のことである。鉄損は「ヒステリシス損」と「渦電流損」から成る。
■ ヒステリシス損
鉄心を磁化する際に発生する損失を“ヒステリシス損”という。
鉄心に電線を巻き付け、巻き線に電流を流すと電磁石になるということは、よく知られてることである。鉄心の内部には、非常に小さな磁石(分子磁石)がたくさん存在すると考えることができ、巻き線に電流を流すと磁界[H]が鉄心に発生。この磁界による磁力で鉄心内部の分子磁石の向きが段々と揃っていく。これを磁化と言う。
磁界を大きくすればするほど(電流をたくさん流すほど)分子磁石の向きはそろっていき、分子磁石の向きが揃えば揃うほど鉄心内部の磁束密度[B]が大きくなる。磁界を大きくし続けると、分子磁石の向きが全て揃った段階で鉄心内部の磁束密度が大きくならなくなる。この状態を磁気飽和という。
ここで、巻線に流している電流を0にする。電流が0(=磁界が0)になった段階で、実は鉄心内部の磁束密度は0にならない。これは、分子磁石の向きが完全にもとには戻らないからである。この時の磁束密度の大きさを残留磁束密度という。
鉄心の磁力を0に戻すためには逆向きの磁界をかける(逆向きの電流を流す)必要があり、これがヒステリシス損となる。この時の磁界の強さを保磁力といい、保磁力が大きいと磁力を0にするために強い磁界を掛ける必要がある。再度磁気飽和に至るまで逆向きの電流を流し、そこから再び鉄心の磁力を0にしようとした際にも、同様の現象が起こる。
ここまでの巻線が発生させる磁界[H]と鉄心内部の磁束密度[B]の関係を図示すると、下図のようになる。
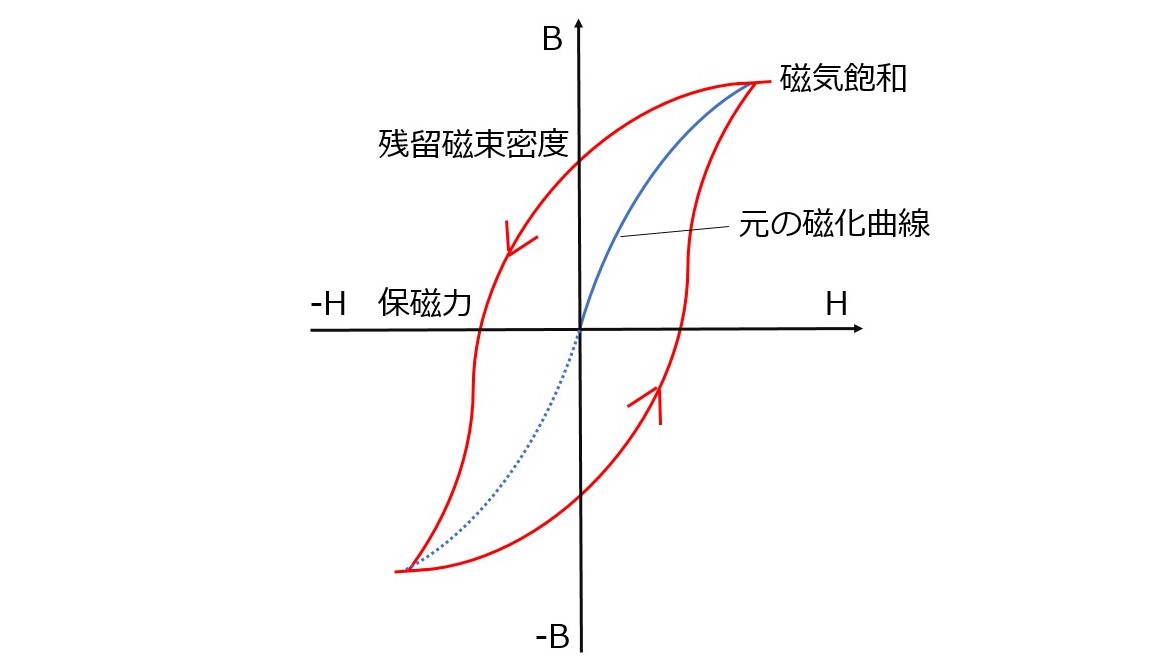
上の図の赤で描かれた曲線をヒステリシスループといい、このヒステリシスループの面積が大きくなるほど、ヒステリシス損は大きくなる。
■ 渦電流損
鉄心内部に流れる渦電流によって生じる損失を“渦電流損”という。
巻線に交流電圧をかけると、電圧の大きさと向きは周期的に変化するので、巻線に流れる電流の大きさや向きもこれに合わせて変化する。すると、鉄心中の磁束の大きさと向きも同様に変化する。電磁誘導の法則により、鉄心内部には磁束の変化を妨げる方向に起電力が生じ、電流が流れる。これが渦電流である。ちなみに、渦電流損は電磁調理器(IH)が調理器具を発熱させるのと同じ原理である。モーターでは、鉄心に薄い鉄板を重ねたもの(積層鋼板)を使うことにより、渦電流が流れる経路を減らし、渦電流損を減少させている。
鉄損は磁界の変化が激しくなるモーターの高回転時に顕著になる。逆に、モーターが停止している状態では鉄損は発生しない。
まとめ
■ モーターで発生する主な損失は「銅損」と「鉄損」である
■ 鉄損は「ヒステリシス損」と「渦電流損」から成る

参考文献:
電検Tips 『鉄損とは?ヒステリシス損と渦電流損について分かりやすく解説』
EVの効率を飛躍的に向上させるSiCへの期待
はじめに
以前解説した通り、EVのモーターを制御するのは インバーター であり、そのインバーターの要となる存在が パワー半導体 である。EVの性能はパワー半導体が左右すると言っても過言ではない。
従来のパワー半導体には シリコン(Si)半導体 が使用されてきた。ところが、2017年、TESLA が新型車両 Model3 に搭載されるインバーターに、量産EVとしては世界で初めて 炭化ケイ素(SiC)半導体 を使用したことで話題を集めた。今回はこのEVの性能を飛躍的に向上させると期待が高まる SiC半導体 について解説していく。
Si と SiC の違い
そもそも、Si と SiC は名前こそ似ているが全く異なる材料である。材料が異なるということは物性も異なる。以下にSiとSiCのそれぞれの特徴をまとめた。
■ シリコン(Si)
地球上にありふれた元素。安定したダイヤモンド構造をしていて、半導体の材料として重宝される。
■ 炭化ケイ素(SiC)
シリコン(Si)と炭素(C)で構成される化合物半導体材料。シリコンに比べ更に結合力が強く、熱的、化学的、機械的に安定している。SiCには様々な結晶多系があり、中でも 4H-SiC がパワーデバイス向けに最適とされている。
| 特 性 | Si | 4H-SiC | 単 位 |
| 結晶構造 | ダイヤ | 六方晶 | - |
| バンドギャップ:Eg | 1.12 | 3.26 | eV |
| 電子移動度:μn | 1400 | 900 | cm^2/Vs |
| 正孔移動度:μp | 600 | 100 | cm^2/Vs |
| 破壊電界強度:EB | 0.3 | 3 | (V/cm)*10^6 |
| 熱伝導率 | 1.5 | 4.9 | W/cmK |
| 飽和ドリフト速度:Vs | 1 | 2.7 | (cm/s)*10^7 |
| 比誘電率:εS | 11.8 | 9.7 | - |
| p,n制御 | ○ | ○ | - |
| 熱酸化物 | ○ | ○ | - |
上の表はSiと4H-SiCの物性値を比較したものである。表より、SiCは バンドギャップ がSiの約3倍であり、破壊電界強度 に関しては約10倍である。SiCはこれらの特性からモーター駆動などの高耐圧・大電流用途でSiよりも有利となる。
その理由に関しては事項で詳しく解説する。
なぜ SiC が良いのか
■ バンドギャップが広いメリット
バンドギャップは動作上限温度を左右する重要な特性である。温度が上昇すると熱エネルギーによって電子が遷移するという現象が生じる。バンドギャップが広いSiCでは、電子が遷移するためにより高い熱エネルギーが必要になるので、高温動作が可能になる。
■ 破壊電界強度が高いメリット
通常、耐圧を高くする場合 ドリフト層 を厚くする場合がある。しかしドリフト層を厚くすると抵抗が大きくなる。破壊電界強度が高いSiCは高耐圧化の際にSiに比べ薄い膜厚で済む。膜厚が薄いと単位面積あたりのオン抵抗が小さくなり、電力損失低減へと繋がる。
まとめ
SiC半導体には以下のような特徴があり、Si半導体と比較すると 低損失、高耐圧 で 高温作動が可能 である。インバーターのパワー半導体にSiCを採用することによってEVの効率を飛躍的に向上させると期待されている。
SiC半導体の特徴:
■ バンドギャップが広い
■ 破壊電界強度が高い
SiC半導体は、スイッチング速度は速いが高耐圧になるとオン抵抗が高くなってしまう MOSFETと相性が良い。
参考文献:
Motor Fan illustrated Vol.182 『EVの作り方』 三栄
粉川昌巳 『絵ときでわかるパワーエレクトロニクス』 オーム社
モーターの高回転の為の『過変調動作』『1パルス動作』
はじめに
先日、モーターは高回転領域が苦手であるということについてこちらの記事で解説した。その際、弱め磁界制御という方法でモーターの最高回転速度を上げていると説明したが、この方法にはエネルギー変換効率が低下するという問題がある。そこで今回はモーターの最高回転速度を上げる別の方法である、インバーターの「過変調動作」「1パルス動作」について解説していく。
インバーターの出力電圧とPWM
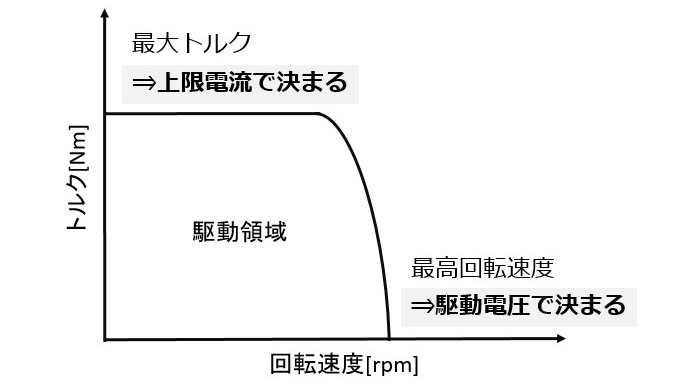
モーターの最高回転速度はインバーターの出力電圧(駆動電圧)で決まる。しかし、モーターは回転すればするほど駆動電圧と逆向き発生する逆起電圧が高くなり、弱め磁界制御はこの逆起電力を弱めてしまおうという方法である。今回解説する「過変調動作」「1パルス動作」は弱め磁界制御とは視点が異なっており、モーターの高回転時にインバーターの駆動電圧を上げてしまおうという方法である。
インバーターはパタパタと周期的にスイッチを切り替えることで直流を交流に変換しているが、その際 PWM (Pulse Width Modulation)(パルス幅変調)と呼ばれる制御によって出力を可変している。通常は、歪みのない正弦波を生み出すことを目的に十分高いスイッチング周波数を設定し電力変換を行う。
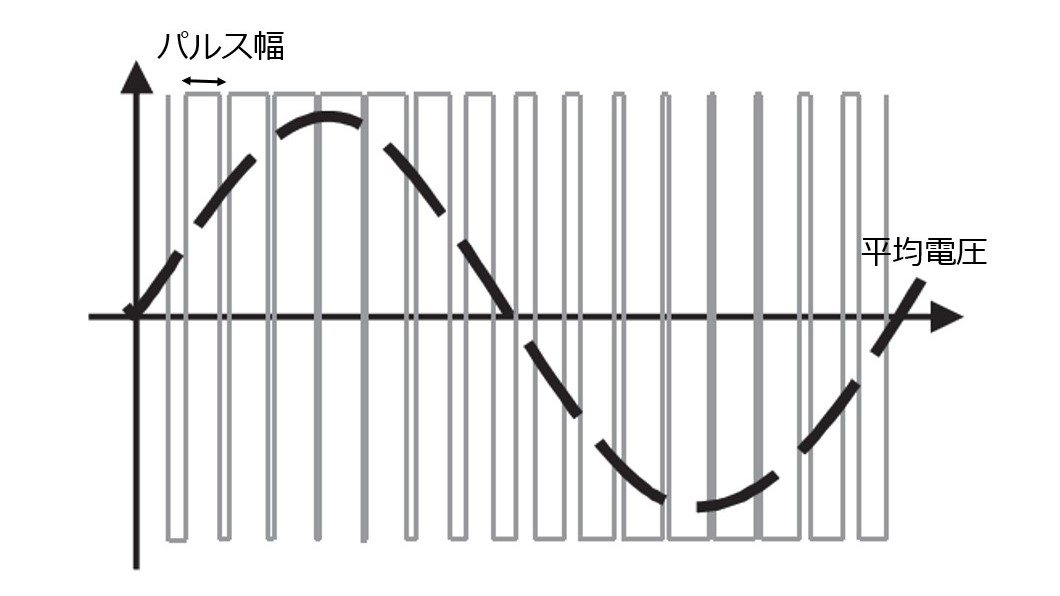
この場合、歪みの少ない理想的な交流波形に近い正弦波を出力可能であるが、出力可能な交流電圧の振幅の上限は電源電圧の半分程度になってしまう。※PWMについてはこちらの記事で詳しく解説している。
しかし、正弦波の歪みの抑制を犠牲に方形波に近い電圧波形を取ることにより、インバーター出力電圧をさらに増加させることができる。このような動作状態を「過変調動作」「1パルス動作」と呼ぶ。
過変調動作・1パルス動作
以下に過変調動作・1パルス動作時のインバーターの出力電圧の波形を示す。
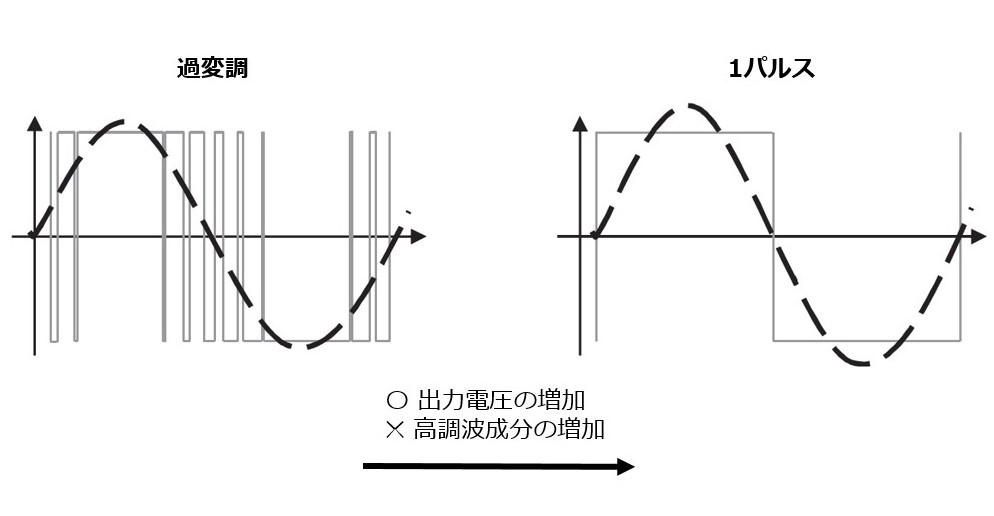
図の左のような状態を「過変調動作」、右のような完全に方形波になった状態を「1パルス動作」と呼ぶ。インバーターを過変調動作・1パルス動作させることにより、電源電圧を変更することなく駆動電圧を増加させることができ、モーターの高回転化が可能となる。特に1パルス動作時のような完全な方形波になると、出力電圧は最大で約1.27倍になる。しかしながら、過変調動作・1パルス動作時には出力電圧の正弦波に大きな歪みが生じるので、制御が煩雑になり、制御系が不安定化するといった問題点がある。
まとめ
PWMで歪みの少ない理想的な交流波形に近い正弦波を出力しようとした場合、出力可能な交流電圧の振幅の上限は電源電圧の半分程度
⇓
正弦波の歪みを犠牲に過変調動作・1パルス動作させることにより、電源電圧を変更することなく駆動電圧を増加させることができる
⇓
モーターの高回転化に貢献(ただし制御系は不安定化する)
参考文献:
モーターの得意なこと・苦手なこと
はじめに
EVの最大の特徴は、ガソリンエンジンがモーターに置き換わっているという点である。(HEVの場合は併用となる)どちらも、回転エネルギーを発生させ自動車を駆動するという役割を担っているが、その性格は若干異なる。そこで今回はこのEV用モーターの「得意なこと」「苦手なこと」について解説していく。
モーターの得意なこと
第一に、モーターは駆動時にガソリンエンジンのような騒音・振動を発生させないので車の乗り心地が非常に良くなる。
第二に、モーターは回転がゼロのところで電力を投入すると、回り始めた瞬間から最大トルクを発揮するといった特性があり、発進加速時の応答性に優れている。各自動車メーカーが自社の新型EVの“スポーティーで力強い加速感”をアピールしていることが多いのは、モーターのこの特性の恩恵を受けているからである。以下は、国産車最速と言われる日産のスポーツカー(ガソリンエンジン)とTESLAの新型高級セダン(モーター)の0-100km/hタイムを比較したものである。スケール感が伝わりづらいので、世界一の加速力を誇る富士急ハイランドのジェットコースターの加速タイムも併記してある。
■ TESLA ModelS Plaid (モーター)
■ 富士急 ド・ドドンパ (ジェットコースター)
第三に、モーターのエネルギー効率はガソリンエンジンをはるかに上回る。現在、エンジンの最大効率は40%強であるが、モーターで40%の効率を切ることはまずあり得ない。実際に、モーターの場合バッテリーからホイールまでのエネルギー効率はほとんどの領域で80~90%を超える。※このとき発生する損失についてはこの記事とこの記事で解説している。
モーターの苦手なこと
ここまではモーターの得意なことを挙げてきたが、ここからはモーターの苦手なことについて解説していく。一見、モーターには欠点が無く理想的な機械であると思い込んでしまうが、意外にもモーターは高回転領域が苦手である。
以前解説した通り、モーターの回転数=インバーターが作り出す回転磁界の回転数であるが、この回転磁界を高速で回せば回すほど(交流の周波数を上げれば上げるほど)、いくらでも高速化できるわけではない。モーターの高回転化を阻む要素として逆起電圧と呼ばれる現象の存在が挙げられる。手回し発電機を想像すれば解るように、モーターは回転すればするほど発電機としての働きが強くなる。回転すればするほど、インバーターから入力される電圧(駆動電圧)と逆向きに発生する逆起電圧は大きくなる。逆起電圧と駆動電圧の差が小さくなっていくにつれ電流は流れにくくなり、最終的にこれらが釣り合うと電流が流れなくなり、モーターの回転速度が頭打ちになってしまう。
ステーターコイルの巻き数を少なくして逆起電圧を抑えればこの問題を回避できるが、この方法では同時に得られるトルクも小さくなってしまう。高回転だけでなく、トルクも必要な自動車用途にこの方法をそのまま当てはめることは難しい。そこで、EV用のモーターでは弱め磁界と呼ばれる制御を行っている。※他にも二相変調や過変調・1パルス動作といった方法もある。これらについてはこの記事とこの記事で解説している。
■弱め磁界制御
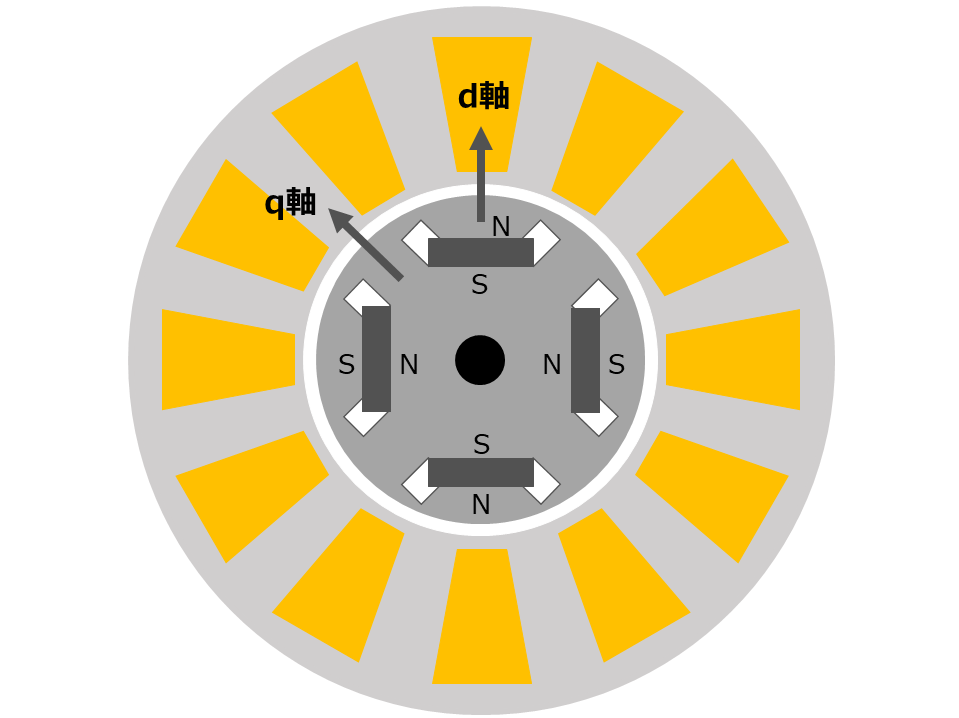
上の図のように、磁石のNとSの境界線部分をq軸、磁極の部分をd軸と呼ぶ。q軸側の電磁石に電流を流すとトルクが発生するが、d軸側の電磁石に電流を流してもトルクは発生しない。d軸電流は流す方向によって磁石の磁界を弱めたり強めたりすることができる。この時、d軸電流によって磁石の磁界を弱くし、モーターの回転速度を上げる方法を弱め磁界制御という。
しかし、この方法にも副作用が伴う。弱め界磁に用いられるエネルギーはモーターの出力に寄与しないため、エネルギー効率は当然低下してしまう。さらに、モーターの高回転時には鉄損も大きくなるので、エネルギー効率低下に拍車をかけることとなり、総じてモーターは高回転領域が苦手といえる。
まとめ
EV用のモーターには以下のような特徴がある。
■ 駆動時に騒音・振動を発生させない 〇
■ 発進加速時の応答性に優れている 〇
■ エネルギー変換効率に優れている 〇
■ 高回転領域ではエネルギー効率が低下する ✕
参考文献:
Motor Fan illustrated Vol.184 『よくわかるモーター』 三栄
モーターの仕組みと『インバーター』の役割
はじめに
モーター自体は身近かつ昔から存在する技術であるが、自動車の駆動用に広く用いられるようになったのはここ最近のことである。また、モーターとセットで “インバーター” という単語を耳にしたことがあるという人も多いのではないだろうか。今回は、電気そして磁気という目に見えない力を扱いながら自動車を走らせる、EV用モーターの仕組みと、インバーターの役割について解説していく。
モーターが回転する原理
モーターは電気エネルギーを駆動力という物理的なエネルギーへと変換する機械であるが、そこで利用されるのは電気が流れるときにその周囲に発生する磁界である。
モーターが磁石と磁石の間に生じる磁力を利用していることは広く知られていることだが、先の磁界とはこの磁力で満たされている世界であり、空間である。
磁石で磁石あるいは鉄でできたものを引き寄せると、引き付けている間は物体が運動するが、双方が接触したところで運動は止まる。磁石同士の反発力の場合も同様に、磁力が作用の限界となる距離まで双方が離れると運動は終わりをむかえる。
これに対しモーターが電気自動車を駆動させるには、モーターは連続的に回り続けていなければならない。そこで、モーターは連続的に力を得るべく、磁界を回転させている。
回転する磁界を追いかけるようにローターが回転するも、ローターが回転すると同時に磁界も回転する。これがモーターが動作する原理である。この回転する磁界を回転磁界と呼ぶ。

インバーターの役割
前述した回転磁界は、電流の向きが周期的に変化する交流によって作り出されるが、EVの動力源であるバッテリーから得られるのは直流である。そこで、バッテリーから供給される直流を交流に変換する役割をインバーターは担っている。※詳しい電力変換の原理については こちらの記事 で解説している。
インバーターはさまざまな電圧・周波数の交流を自在に作り出すことができる (VVVF: Variable Voltage Variable Frequency)。交流の周波数とモーターで形成される回転磁界の回転数は一致する。つまり、インバーターで交流の周波数を制御することによってモーターの回転数を自在に操ることが可能になる。

EVでは、ドライバーのアクセル操作などを基に算出された目標速度に合わせる形でインバーターが交流を発生させ(これによって回転磁界が形成される)、レゾルバと呼ばれるローター角センサーでモーターの回転数を監視し、車速をコントロールしている。
同期モーターと非同期モーター
EVの駆動用に用いられるモーターは同期モーターと呼ばれるものが主流である。同期モーターは回転磁界の回転に完全に同期しながら回転する。
回転磁界の回転数 = モーターの回転数

一方で、回転磁界とモーターの回転数が同期せず、モーターの回転数を少し上回る回転数で回転磁界が回るモーターも存在する。これは、非同期モーター(誘導モーター)などと呼ばれる。
回転磁界の回転数 ≠ モーターの回転数
非同期モーター(誘導モーター)は高価な永久磁石を使わないので安価であるといった特徴があるが、小型化が難しく、トルク制御、回転数制御が複雑になるため、EVの駆動用モーターとしては現在主流にはなっていない。
| 同期モーター | 誘導モーター | |
| 体積 | 〇 | △ |
| 効率 | ◎ | 〇 |
| 高速回転 | ◎ | ◎ |
| 始動トルク | ◎ | 〇 |
| 高速時トルク | △ | 〇 |
| 制御性 | 〇 | △ |
| コスト | △ | 〇 |
まとめ
以下の理由から、EVのモーター駆動にはインバーターが欠かせない存在である。
■ モーターは連続的に力を得るために磁界を回転させている ⇒ 回転磁界
■ 回転磁界は交流によって形成され、インバーターが直流を交流に変換する役割を担っている
■ インバーターで交流の周波数を制御することによって、モーターの回転数を自在に操ることが可能となる
参考文献:
見城 尚志, 佐渡 友茂 『メカトロニクスのモーター技術』 技術評論社
Motor Fan illustrated Vol.166 『よくわかる電動車』 三栄
Motor Fan illustrated Vol.184 『よくわかるモーター』 三栄